Zurück zu Projekte
STRIX
In Zusammenarbeit mit
Clemens Wolfsberger und Benjamin Höllmüller

Projektbeschreibung
STRIX ist ein System zur automatisierten, KI-gestützten Erfassung und kartografischen Verortung von Verkehrszeichen auf österreichischen Autobahnen. Ein Aufnahmefahrzeug befährt die Strecke, das System erkennt Schilder in Echtzeit, ordnet sie der korrekten Richtungsfahrbahn zu und berechnet daraus maschinenlesbare Gültigkeitsbereiche — kompatibel mit den bestehenden Datensystemen der ASFINAG. Das Projekt entstand als Diplomarbeit an der HTL Rennweg in Kooperation mit der ASFINAG.
Systempipeline
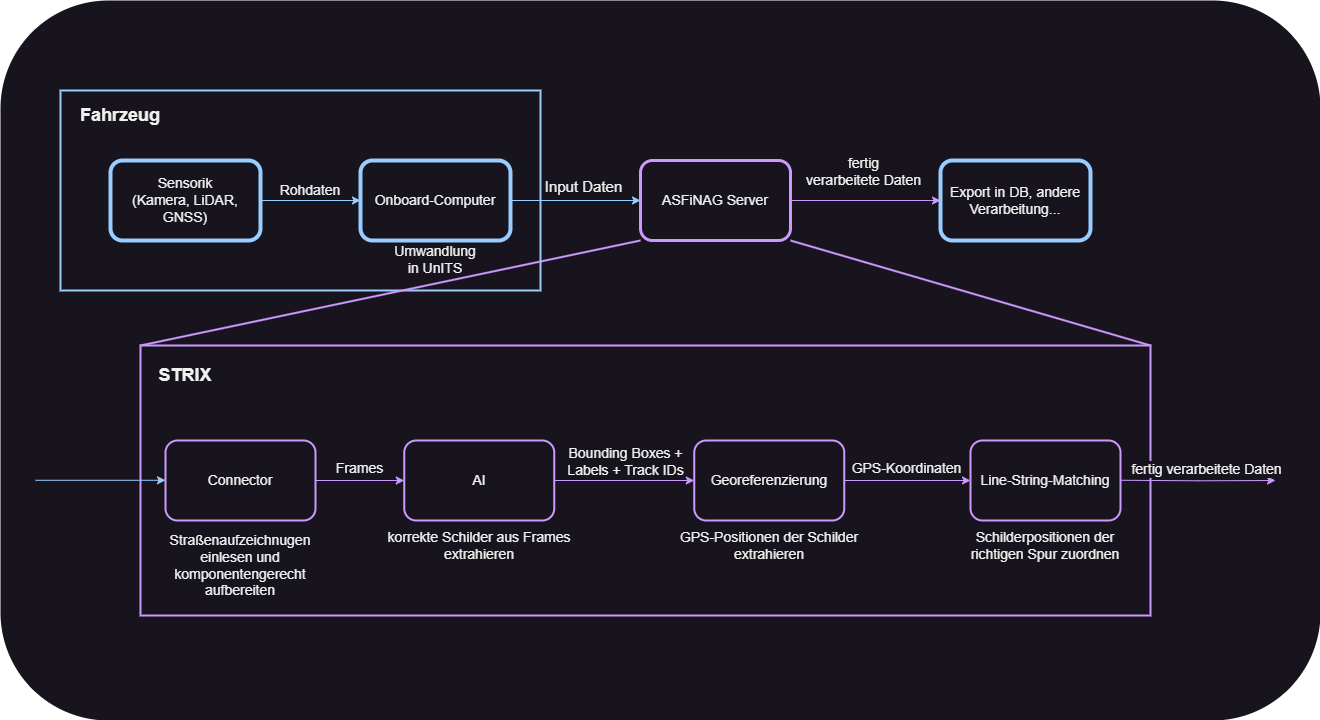
Pipeline — Schritt für Schritt
▾
91 %Precision (Ziel: ≥ 75 %)
88 %Recall (Ziel: ≥ 70 %)
LizenzfreiASFINAG-Anforderung erfüllt
▾
< ±10 mMax. geforderte Positionsabweichung — erfüllt
▾
450.648ASFINAG-Referenzpunkte
−93 %Ladezeit (Excel → Parquet)
O(log n)KD-Tree Suchanfragen
▾
"100 km/h, km 10–20, S01 →"Beispiel-Output
▾
Straße · km · RichtungExportstruktur
Evaluierung auf realen Autobahnabschnitten
91 %PrecisionZiel: ≥ 75 %
88 %RecallZiel: ≥ 70 %
< ±10 mGPS-GenauigkeitASFINAG-Anforderung
Technologien
PythongRPCVue 3DockerGNSSComputer Vision